
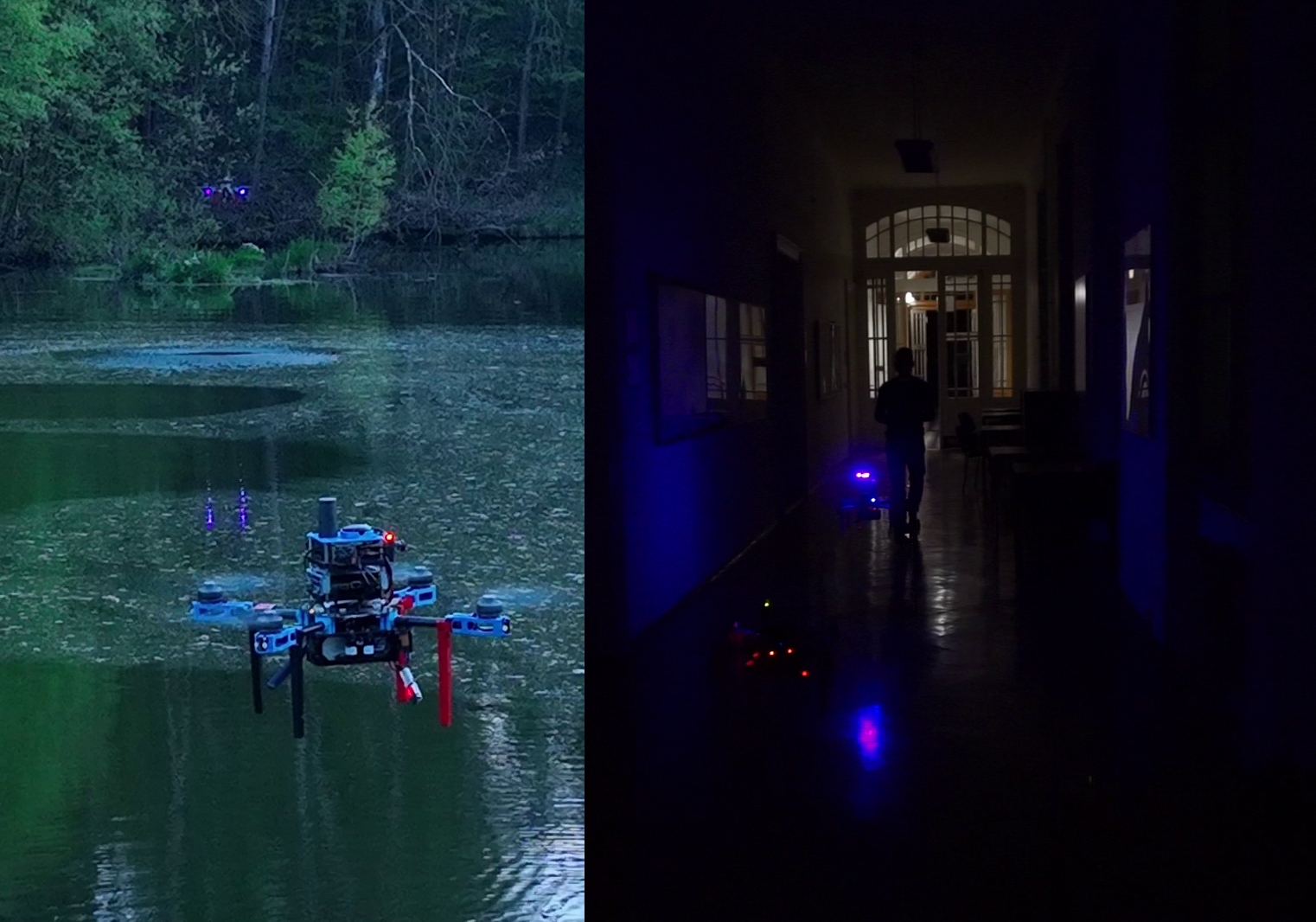
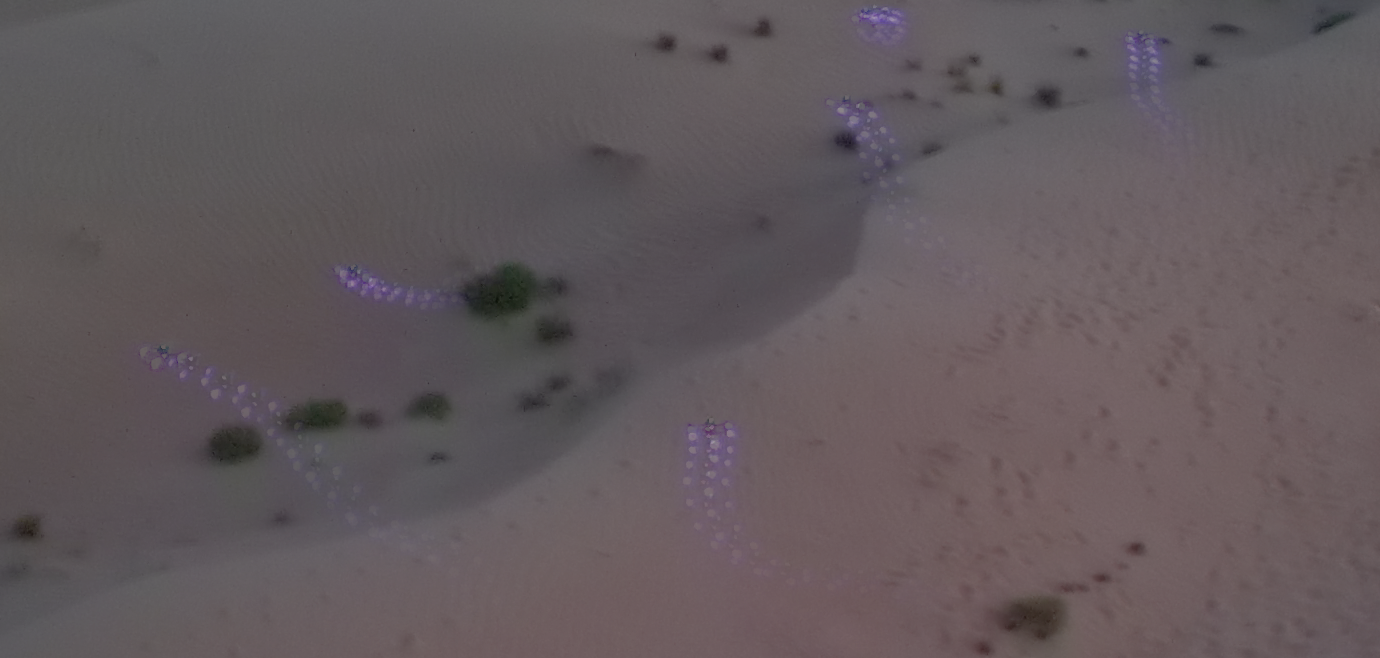
Hi! I’m Tim, I’m currently doing my PhD in Robotics at the Multi-robot-systems Group at the Czech Technical University in Prague supervised by Martin Saska. My research focuses on mutual relative localization for agile UAV teams, enabling autonomous cooperation in challenging real-world environments.
In the next stage of my PhD, I am working on intention-based swarming using implicit optical camera communication. I am currently interested in a research stay of about 4 to 6 months and would be happy to explore collaborations on decentralized UAV swarms, particularly in the areas of mutual relative localization, intention-based swarming, and resilient multi-agent coordination.
Outside of research, I enjoy road cycling, running, and bouldering. I started climbing during my studies in Würzburg and have recently begun exploring rope climbing as well.
Featured News
I presented my work on Reflection-based Relative Localization at ICRA 2026 in two poster sessions as part of workshops: Sea2Space and Aerial inspection for marine infrastructures
I submitted my latest work, Reflection-Based Relative Localization for Cooperative UAV Teams Using Active Markers, which is currently under review at RA-L. Preprint available
Presented my research at ICINCO 2025 conference.
Contributed to organizing the practical task for the 2025 IEEE RAS Summer School. Our team prepared the hands-on task on Multi-Robot Inspection and Monitoring (MRIM) of a land-surface mine.
Started my PhD at the Multi-Robot-systems Group at the Czech Technical Univerisity in Prague.
Finished my M.Sc. in Aerospace Computer Science at Julius-Maximilians-Universität Würzburg.
Publications
Preprints
Reflection-Based Relative Localization for Cooperative UAV Teams Using Active Markers
Under Review in IEEE Robotics and Automation Letters (RA-L), 2025
Journal
Towards agile multi-robot systems in the real world: Fast onboard tracking of active blinking markers for relative localization
published in Robotics and Autonomous Systems (RAS), 2025, Video
Conferences
Towards Scalable and Fast UAV Deployment
published in ICINCO 2025, Marbella, Spain, 2025